
How to Get Into Robotics: A Practical Roadmap
Learn how to get into robotics with this 2025 practical roadmap. Build robots, code motion control, add sensors, and master ROS 2 the hands on way.

Share :
Quick answer
Learn how to get into robotics with this 2025 practical roadmap. Build robots, code motion control, add sensors, and master ROS 2 the hands on way.
Quick Answer
Learn how to get into robotics with this 2025 practical roadmap. Build robots, code motion control, add sensors, and master ROS 2 the hands on way.
Who This Is For
- Robotics Beginner
- Robotics Student
- Career Shifter
What You Will Learn
- What Robotics means in practical robotics.
- How this topic connects to real robot projects.
- What to learn or build next after this article.
Getting into robotics often feels overwhelming. Hardware. Software. Mathematics. Algorithms. Where do you start with a robot, or with code? This guide breaks down a clear, experience-backed roadmap that helps you learn robotics the practical way, not just theoretically. Whether you're a student, hobbyist, or aspiring robotics engineer, this structured approach will help you move from zero to building autonomous robots confidently.
1. Start With the Hardware Build or Buy a Simple Robot
The first step in how to get into robotics is to get a physical robot. Robotics is hands-on. You can't learn it effectively without one. You have two paths:
- Buy a ready-made robot (faster but limited understanding), or
- Build one from scratch (slower but foundational). Building a robot yourself helps you understand the mechanics 3D design, electronics, wiring, and sensors. A great beginner choice is a two-wheel differential drive robot, simple yet powerful for learning control and motion.
Core Components You'll Need
Component****Purpose Microcontroller (ESP32, Raspberry Pi, Arduino)Brain of the robotMotor DriverControls the motors' speed and directionBatteryPower sourceMotors & WheelsMovementSensors (Ultrasonic, IR, Encoder)Environment awareness Start small just get your robot moving forward, backward, left, and right. This step introduces you to locomotion, the foundation of robot mobility.
2. Learn to Control the Robot: Motion Programming
Once your hardware setup is ready, begin controlling it through software. For beginners, Arduino or ESP32 microcontrollers are great starting points. Here's a simple example of differential drive control using Arduino:
int leftMotorForward = 2;
int rightMotorForward = 3;
int leftMotorBackward = 4;
int rightMotorBackward = 5;
void setup() {
pinMode(leftMotorForward, OUTPUT);
pinMode(rightMotorForward, OUTPUT);
pinMode(leftMotorBackward, OUTPUT);
pinMode(rightMotorBackward, OUTPUT);
}
void loop() {
// Move forward
digitalWrite(leftMotorForward, HIGH);
digitalWrite(rightMotorForward, HIGH);
delay(1000);
// Stop
digitalWrite(leftMotorForward, LOW);
digitalWrite(rightMotorForward, LOW);
delay(500);
// Turn left
digitalWrite(leftMotorBackward, HIGH);
digitalWrite(rightMotorForward, HIGH);
delay(700);
// Stop again
digitalWrite(leftMotorBackward, LOW);
digitalWrite(rightMotorForward, LOW);
}
This code helps you test locomotion the base step before adding sensors or intelligence.
3. Add Sensors and Environmental Awareness
Next, help your robot "see." Integrate sensors like ultrasonic, infrared, or line sensors. The goal is to create one simple behavior first like obstacle avoidance or line following. A basic obstacle avoidance algorithm looks like this:
int distance = readUltrasonic(); // pseudo function
if (distance < 15) {
stopMotors();
turnLeft();
} else {
moveForward();
}
Each sensor introduces new data. As you build more algorithms, your robot begins to react intelligently. This is the bridge from mechanical control to autonomous behavior.
4. Learn Odometry and Sensor Fusion
When learning robotics for beginners roadmap 2025, odometry and sensor fusion are key topics.
Odometry helps your robot estimate its position (x, y) using encoder data. However, encoders alone can drift due to mechanical inaccuracies that's where sensor fusion (combining encoder, IMU, and other sensors) comes in.
A simplified odometry update equation:
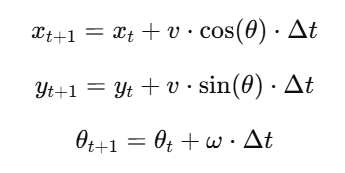 These calculations form the core of motion estimation in mobile robots. You can refine these with probabilistic models like Kalman filters for smoother results - a key concept in odometry sensor fusion robotics.
These calculations form the core of motion estimation in mobile robots. You can refine these with probabilistic models like Kalman filters for smoother results - a key concept in odometry sensor fusion robotics.
Learning Curve Chart
Below is a conceptual roadmap that summarizes your progression:
- Stage
- Focus
- Key Skill Step 1Build a robotLearn mechanics and wiringStep 2Drive the robotProgramming motionStep 3Add sensorsEnvironmental understandingStep 4Apply odometryEstimate positionStep 5Sensor fusionImprove accuracyStep 6DocumentationVersion control & collaboration This sequence helps you grow from beginner to capable robotics developer.
5. Add Mathematics and Probability for Accuracy
Once your robot can move and sense, improve accuracy with mathematical modeling. This involves error correction, estimation, and coordinate transformations. For example, if your encoder says the robot moved 10 cm but actually moved 9.6 cm, you apply correction factors derived from statistical averages or probabilistic filters. For foundational mathematics behind robotics motion, you can follow MIT's OpenCourseWare Robotics course (MIT OCW Robotics). It's one of the most detailed free learning resources for understanding robot kinematics and control.
6. Optimize, Document, and Share Your Work
Now that you've built multiple prototypes, improve your code and workflow:
- Organize code with functions and classes (Object-Oriented Programming).
- Use GitHub for version control push each update for collaboration.
- Write documentation explaining setup, installation, and project purpose. Proper documentation makes it easier to share, reuse, and present your work professionally whether for research, portfolios, or collaboration. For examples of structured learning paths and robot projects, explore**Robotisim**it offers step-by-step resources and real-world robotics development examples.
Robotics for Beginners Roadmap 2025
The robotics for beginners roadmap 2025 focuses on building real, hands-on understanding before diving into advanced AI or simulation tools. In 2025, the learning trend has shifted employers and research labs now value engineers who can build, test, and iterate rather than just code theoretically. Here's how to structure your learning path this year:
- **Start with hardware-first learning:******Build a simple mobile robot using ESP32 or Raspberry Pi. Hardware experience gives you a tactile understanding of sensors, circuits, and motor control.
- **Layer on software and control logic:******Learn programming with C++ and Python - both are essential for robotics logic and control algorithms.
- **Introduce ROS 2 early:******Modern robotics in 2025 revolves around ROS 2 (Robot Operating System 2). It's the standard middleware connecting sensors, control nodes, and high level decision making.
- **Practice integration:******Combine IMU, encoders, and LiDAR data using sensor fusion techniques for accurate localization.
- **Simulate before deploying:******Use Gazebo or Webots for testing your robot models virtually before running them physically it saves time and reduces hardware wear.
- **Publish your work:******Document and share your projects on GitHub or LinkedIn. In 2025, visible practical work often carries more value than certificates. By following this structured 2025 roadmap for robotics beginners, you'll move confidently from wiring circuits to deploying robots that navigate and make decisions autonomously.
Frequently Asked Questions
1. Do I need programming experience to start robotics? ****Basic C++ or Python knowledge helps, but you can begin with block-based platforms like Arduino IDE or TinkerCAD before moving to ROS 2.
2. Which robot should I start with as a beginner? ****A two-wheel differential drive robot is perfect. It's affordable and teaches essential locomotion concepts.
3. What is odometry in robotics? ****Odometry estimates a robot's position using encoder readings. It helps track movement in x, y coordinates.
4. How long does it take to learn robotics practically? ****It varies usually 3-6 months of consistent learning and experimentation is enough to start building autonomous robots.
5. What tools do professionals use for robotics development? ****ROS 2, Gazebo, and microcontrollers like ESP32 or Raspberry Pi are industry standards for both simulation and real-world testing.
Conclusion
Understanding how to get into robotics isn't about jumping straight into AI or complex automation. It's about progression building, coding, sensing, correcting, and optimizing. Follow this roadmap, and you'll move from basic control to developing fully autonomous systems with confidence. See the full TASK LIST
Practical Example
A practical way to use this article is to connect the concept to a small robot workflow: identify the input, the processing step, and the output you expect from the robot. If the article involves ROS 2, test the idea in a small workspace or simulation before applying it to a larger robot project.
Common Mistakes
- Trying to memorize the term without connecting it to a robot behavior.
- Skipping the prerequisite concepts that make the workflow easier to debug.
- Copying commands or code without checking what each node, topic, file, or parameter is responsible for.
- Treating one tutorial as a complete roadmap instead of linking it to the next concept.
How This Connects to Other Topics
- Embodied AI and the Future of Robotics
- How to Build a Robot: A Practical Learning Roadmap
- How to Start Robotics as a Beginner
- Essential Mathematics for Robotics and Control
- The Biggest Mistake New Robotics Learners Make and How to Fix It
Learn Next
- Embodied AI and the Future of Robotics
- How to Build a Robot: A Practical Learning Roadmap
- How to Start Robotics as a Beginner
- Essential Mathematics for Robotics and Control
- The Biggest Mistake New Robotics Learners Make and How to Fix It
- Robotics Engineer Learning Path
FAQ
Is How to Get Into Robotics: A Practical Roadmap suitable for beginners?
Yes. The article is written to make the concept easier to understand, while still connecting it to practical robotics work.
What should I learn before this topic?
Start with the prerequisite ideas listed in the article, then connect them to a small project or simulation so the concept becomes concrete.
How does this topic connect to real robots?
It helps you understand how software, sensors, control, simulation, or career decisions show up in practical robot development.
What should I do after reading this article?
Pick one related concept from the Learn Next section and build a small example that uses it.
Can I learn this through Robotisim?
Yes. Robotisim connects these concepts to structured learning paths and project-based robotics practice.
Final Summary
How to Get Into Robotics: A Practical Roadmap is part of the broader Robotics Learning Roadmap learning path. The key is to understand the concept, connect it to a real robot workflow, and then practice it through a focused project instead of learning it in isolation.
This article supports Robotics Engineer Learning Path, especially Robotics.
Learn with Robotisim
Start the Robotisim robotics learning path and build practical projects.
Explore the academyLearn next

Embodied AI and the Future of Robotics
Learn how embodied AI lets robots sense, think, and act in the real world using perception, state estimation, and physical intelligence.
Read more
How to Build a Robot: A Practical Learning Roadmap
Are you learning robotics the wrong way? Discover how to build a robot with the right roadmap, avoiding common mistakes and wasted effort.
Read more
How to Start Robotics as a Beginner
Learn how to start robotics for beginners with a clear step by step guide. Build a simple robot, use ESP32, learn ROS 2, and explore SLAM.
Read more
Essential Mathematics for Robotics and Control
Learn the core mathematics for robotics and control using vectors, matrices, and transforms. Includes code and examples for real robot control.
Read more